<del id="aymay"></del>
近年來我國對于航空領域的電子技術研究日漸興盛,對于傾轉旋翼機的研究尤為突出。與傳統飛機相比,傾轉旋翼機以其可實現垂直起降和水平飛行兩種模式的切換外,同時還具有載重量大等優點。本文就將采用ADuC7060單片機為控制芯片,針對傾轉旋翼機控制的無刷直流電機驅動器進行講解。
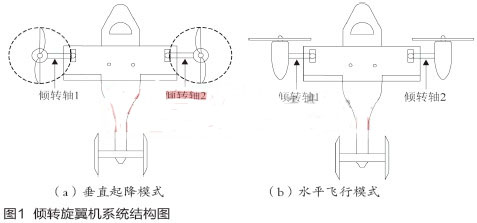
說到傾轉旋翼機,首先要了解其結構(如下圖所示)。通常傾轉旋翼機分為垂直起降模式和水平飛行模式。系統采用MEMS陀螺儀和加速度計作為傳感器,為控制器提供位置姿態信號,在負反饋機制作用下,驅動執行器進行姿態調節。以垂直起降模式為例,當兩傾轉軸同向轉動時,就可以實現俯仰姿態的調節;當兩傾轉軸反向轉動時,就會為機體提供一個扭矩,實現偏航姿態的調節;而當左右兩個電機轉速差動時,就實現滾轉姿態的調節。可見,無刷直流電機的平穩調速對旋翼機系統至關重要。
目前無位置傳感器無刷直流電機驅動策略主要以反電勢法為主,也就是說不需要借助位置傳感器,僅通過檢測反電勢信號就可以判斷轉子位置,具有結構簡單、可靠性高等優點(如下圖所示),為A相繞組的反電勢在一個電周期內的波形,其中橫軸代表當前運行時刻的電角度,縱軸代表A相繞組產生的反電勢Ea。從圖中可以看出,當檢測到反電勢信號過零點后,再延遲30°電角度即是換相點。對于三相繞組電機,每隔60°電角度就會產生一個反電勢過零點,過零點信號被ADuC7060微控制器檢測并處理后,就可以產生相應的驅動信號驅動電機連續運轉。
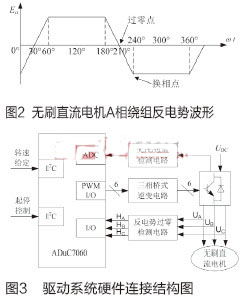
本文采用電壓為12 V的模型動力電池供電。硬件連接框圖如上圖所示,ADuC7060微控制器通過I2C接口接收來自主控制器發送的控制信號,根據轉速要求改變PWM占空比,并實時檢測反電勢過零信號,進而通過橋式逆變電路驅動電機調速。為了保證運行安全,系統中還利用采樣電阻設計了欠壓/過流檢測電路,以便在電池欠壓和電機堵轉過流時為系統提供保護。下面將對主要單元電路分別進行介紹。在本系統中,逆變電路為三相橋式結構,采用上橋臂單邊PWM控制。如圖4所示,圖中V1~V6為功率MOSFET,上橋臂選用型號為IRFR5305的P溝道功率MOSFET,當PWM輸出高電平時導通;下橋臂選用型號為IRFR1205的N溝道功率MOSFET,當I/O端口輸出低電平時導通。在每個功率MOSFET的前端都放置了一個三極管,目的是提高微控制器端口的驅動能力,保證MOSFET的可靠開關。在一個電周期內,控制導通相序為AB→AC→BC→BA→CA→CB,即可使電機連續旋轉。




