<del id="aymay"></del> 0引言
醫(yī)學(xué)上針對(duì)腰椎間盤(pán)突出癥等腰脊椎病,通常采取物理牽引的保守治療方法。本牽引床系統(tǒng)是以?xún)啥问酱搀w為治療平臺(tái),采用ARM等嵌入式處理器并結(jié)合計(jì)算機(jī)對(duì)床體各自由度運(yùn)動(dòng)實(shí)現(xiàn)分布式控制,并由直流電機(jī)實(shí)施外力快、慢速牽引及床體的任意角度的快慢速旋轉(zhuǎn),從而實(shí)現(xiàn)腰脊椎病的物理治療。
1系統(tǒng)功能與總體設(shè)計(jì)
牽引床以?xún)啥问酱搀w為治療平臺(tái)。其床體分為前、后兩段,供病人躺臥。前段有固定帶將病人腰上部固定,利用牽引帶與活動(dòng)床頭相連。牽引運(yùn)動(dòng)是前后方向的平動(dòng)。床頭在電機(jī)驅(qū)動(dòng)下可向前牽出一定距離,而病人腰部則是被固定著,這樣牽引帶對(duì)腰椎就有了一定的作用力。床頭安裝“S”型拉力傳感器檢測(cè)牽引力。后段床體也有固定帶將病人的腰下部至胯骨處固定,并可在電機(jī)帶動(dòng)下以腰部處為軸心做水平平面的擺動(dòng)、垂直軸向的傾斜升降轉(zhuǎn)動(dòng)、以及向左右兩側(cè)的旋轉(zhuǎn)共三個(gè)自由度的轉(zhuǎn)動(dòng)。前段床體的牽引速度可調(diào),后段床體的旋轉(zhuǎn)角度與旋轉(zhuǎn)速度也可任意設(shè)定。
牽引床為醫(yī)師提供四個(gè)自由度可調(diào)節(jié)的物理運(yùn)動(dòng),充分滿(mǎn)足腰椎病物理治療的需要。實(shí)際治療中,醫(yī)生根據(jù)患者的病理情況,將后床面的左、右旋轉(zhuǎn)結(jié)合慢牽基礎(chǔ)上的快牽功能進(jìn)行合理使用能夠起到“正脊”作用。
牽引床的總體設(shè)計(jì)采取分布式控制體系,如圖1所示。計(jì)算機(jī)作為上位機(jī)通過(guò)RS-485總線與三個(gè)嵌入式控制器(下位機(jī))組成分布式總線網(wǎng)絡(luò)實(shí)現(xiàn)對(duì)床體運(yùn)動(dòng)的控制。計(jì)算機(jī)實(shí)現(xiàn)系統(tǒng)總體操作控制界面。系統(tǒng)復(fù)雜的控制任務(wù)被分解為三部分,分別由三個(gè)嵌入式控制器并行實(shí)時(shí)執(zhí)行完成。其中,牽引運(yùn)動(dòng)及牽引力的檢測(cè)與控制由一片STC89C52RD+單片機(jī)完成;三個(gè)旋轉(zhuǎn)運(yùn)動(dòng)的角度檢測(cè)及控制由Samsong公司的32位ARM核RISC處理器S3C44B0X處理;床體上各類(lèi)限位開(kāi)關(guān)等開(kāi)關(guān)量檢測(cè)及輸出則由另一片STC89C52RD+實(shí)現(xiàn)。
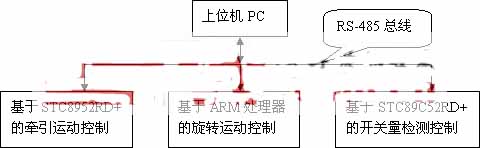
圖1 系統(tǒng)總體設(shè)計(jì)框圖
2 系統(tǒng)硬件設(shè)計(jì)
2.1 基于STC89C52RD+的牽引控制
快慢牽引治療是通過(guò)直流電機(jī)驅(qū)動(dòng)床頭向前運(yùn)動(dòng)從而拉伸固定在患者腰間的固定帶,產(chǎn)生一定的牽引作用力施加在腰椎。牽引力大小及快慢由醫(yī)生設(shè)置,并保持一段時(shí)間。保持期間可配合床體旋轉(zhuǎn)等動(dòng)作進(jìn)行物理治療。
牽引力可由床頭的S型應(yīng)變式拉力傳感器轉(zhuǎn)換為模擬信號(hào)。該信號(hào)大小與加在傳感器上的激勵(lì)直流電壓大小有關(guān)。傳感器靈敏度為2mV/V,若DC激勵(lì)電壓為5V,則傳感器輸出最大信號(hào)為10mV。如果力傳感器的量程為0-200Kg,則對(duì)應(yīng)傳感器輸出模擬信號(hào)為0-10mV。該信號(hào)經(jīng)儀表放大器AD623放大500倍后為0-5V,經(jīng)“Л”型電感、電容無(wú)源網(wǎng)絡(luò)濾波后輸入給10位A/D轉(zhuǎn)換器TLC1549。牽引力信號(hào)頻率很低,處理器每秒鐘采樣20次。采用一個(gè)專(zhuān)用的STC89C52RD+的片內(nèi)硬件定時(shí)器,每隔50ms進(jìn)入定時(shí)器中斷服務(wù)程序通過(guò)SPI串行接口進(jìn)行一次A/D轉(zhuǎn)換,并將轉(zhuǎn)換后的數(shù)據(jù)由UART經(jīng)接口芯片74LBC176轉(zhuǎn)換為485信號(hào)發(fā)送至上位機(jī)。由上位機(jī)判斷后發(fā)出控制指令控制牽引電機(jī)及牽引過(guò)程。
STC89C52RD+是STC公司生產(chǎn)的增強(qiáng)型51單片機(jī),可靠性高,抗干擾性強(qiáng)。在產(chǎn)品注冊(cè)對(duì)控制器做電磁兼容性試驗(yàn)時(shí),發(fā)現(xiàn)采用AT89C52通不過(guò)的電源脈沖干擾試驗(yàn)以及高壓放電干擾試驗(yàn)項(xiàng)目,STC89C52RD+可輕易通過(guò)。STC單片機(jī)的可靠性由此可見(jiàn)一斑。
2.2 基于STC89C52RD+的開(kāi)關(guān)量檢測(cè)與控制
床體采用行程開(kāi)關(guān)為各個(gè)運(yùn)動(dòng)行程進(jìn)行限位,避免系統(tǒng)失控造成牽引力過(guò)大拉傷病患,或旋轉(zhuǎn)、擺動(dòng)角度過(guò)大將病患甩出床體。當(dāng)出現(xiàn)碰觸行程限位開(kāi)關(guān)的情況時(shí),繼電器控制電路將直接切斷電機(jī)電源使電機(jī)停轉(zhuǎn)。控制器STC89C52RD+實(shí)時(shí)檢測(cè)這些信號(hào),并迅速將此信息通過(guò)485串行總線傳至上位機(jī)。系統(tǒng)軟件將停止該進(jìn)程并將系統(tǒng)復(fù)位。單片機(jī)將系統(tǒng)的23個(gè)輸出開(kāi)關(guān)量狀態(tài)鎖存在3片74HC377中,確保狀態(tài)可靠輸出。各路輸出經(jīng)由光電耦合器隔離、ULN2803放大,驅(qū)動(dòng)繼電器的開(kāi)關(guān)來(lái)控制各個(gè)電動(dòng)機(jī)的啟停及組合動(dòng)作。
設(shè)置“急退”按鈕,在病患自己感覺(jué)不舒適的時(shí)候可自行按下,系統(tǒng)將迅速解除牽引力并將床體旋平。當(dāng)病人按下“急退”按鈕,單片機(jī)檢測(cè)到后即通過(guò)485總線將此消息傳至上位機(jī)。系統(tǒng)軟件接收到后,立即停止當(dāng)前的牽引進(jìn)程,并發(fā)出命令,單片機(jī)隨即控制牽引電機(jī)反轉(zhuǎn)解除牽引力。如果床面處于旋轉(zhuǎn)傾斜狀態(tài),則控制將床體旋平。這些措施大大提高了牽引治療系統(tǒng)的安全性與可靠性,對(duì)于一臺(tái)醫(yī)療器械而言是必須要考慮的。
選用一片STC89C52RD+作為專(zhuān)用的開(kāi)關(guān)量檢測(cè)與控制處理器。這樣可使這部分控制程序更簡(jiǎn)潔、純粹,易于實(shí)現(xiàn),可確保系統(tǒng)可靠無(wú)誤的動(dòng)作。若將這部分任務(wù)合并到其他控制器中,會(huì)增加軟件的編程難度,流程會(huì)更復(fù)雜,勢(shì)必將降低系統(tǒng)運(yùn)行的可靠性、安全性。
2.3 基于ARM處理器S3C44B0X的旋轉(zhuǎn)運(yùn)動(dòng)控制
醫(yī)療設(shè)備的運(yùn)行要求低噪音。系統(tǒng)采用高效率、低噪聲的新型220V高壓大功率直流電機(jī)作為床體運(yùn)動(dòng)的執(zhí)行機(jī)構(gòu),來(lái)實(shí)現(xiàn)床體機(jī)械系統(tǒng)多維、多軸、多自由度的運(yùn)動(dòng)。對(duì)直流電機(jī)的控制采用PWM方式。PWM驅(qū)動(dòng)采用高效率大功率VMOS管功放電路。在嵌入式電機(jī)控制處理器選擇上,采用Samsong公司的32位ARM核RISC處理器S3C44B0X。該處理器具有雙串行口、5個(gè)PWM定時(shí)器、8通道10位ADC、最高主頻66MHz,完全勝任運(yùn)動(dòng)控制要求。




